

| 所需器材 | |
| 威栗板 | 1 |
| 无人车扩展板 | 1 |
| 舵机 | 2 |
| 数据线 | 1 |
| 电源适配器 | 1 |
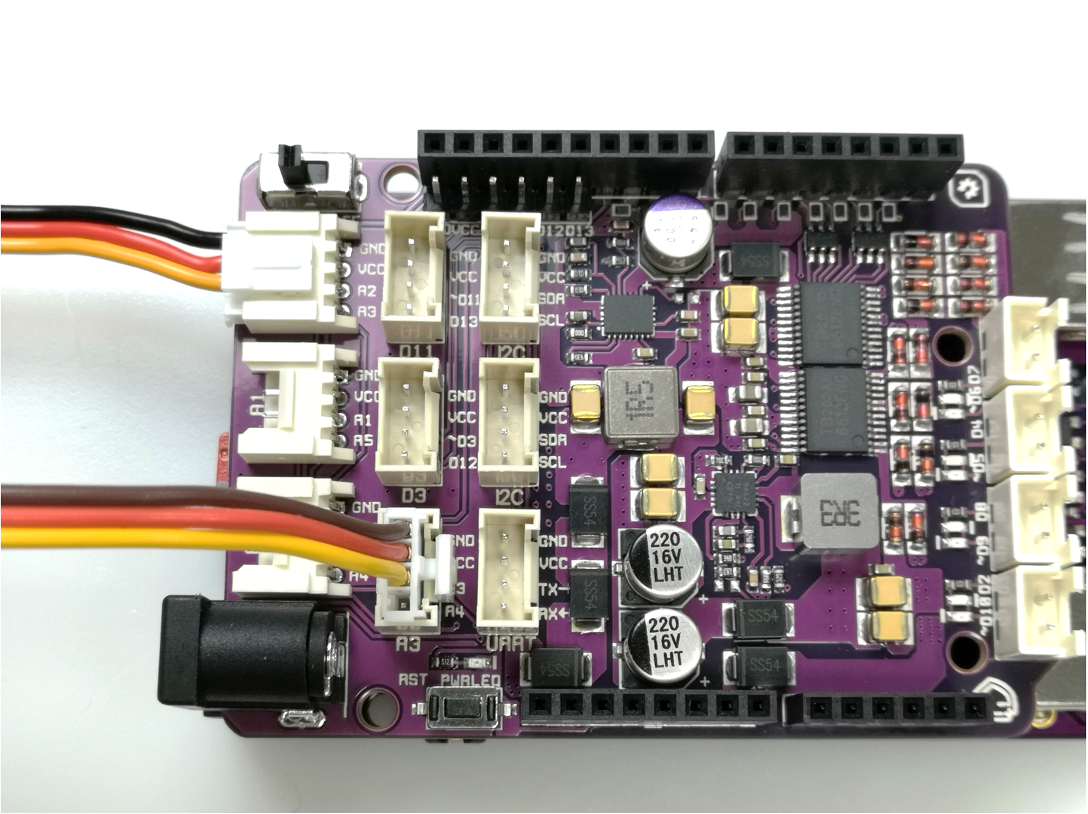
在正式安装前,为了保险起见,我们首先要进行舵机回正,将威栗板与无人车扩展板按两侧排针长短进行组装。

将舵机*2分别连接至扩展板A2、A3接口(注意接口侧面标识)。
将USB数据线Micro USB接口端,连接至威栗板Micro USB接口,USB接口端连接至PC端。


打开创造栗编程软件2.0,在程序主界面上方点击“选择硬件”-选择Arduino UNO。

然后点击“没有连接”,若此时系统已识别威栗板,则会显示对应的COM端口号,点击“连接”即可,若未显示COM端口号,请点击下方刷新。


若成功连接,则点击“返回编译器”或“X”返回编程界面即可。

分别从“控制”标签中找到“初始化”,然后从“输出单元”标签中找到“转动舵机”,并拖入到中间编程区域,将舵机管脚分别改为A2和A3与硬件连接保持一致,角度设置为90°。

程序编写完毕后,选择代码面板上的“自动生成”,然后点击“上传”,将程序上传至威栗板。

上传完毕后,断开电脑与威栗板连接,将电源适配器接入无人车扩展板电源接口并打开扩展板电源开关,此时若舵机处于非90°状态,则会有回正动作;若无回正动作,可能之前已经停在90°位置了。

舵机回正后,我们按照之前的安装步骤分别将威栗板、无人车扩展板以及2个舵机重新拆分。
关于威盛创造栗
▼▼▼
威盛创造栗是威盛集团旗下的人工智能教育领导品牌,致力于提供青少年人工智能教育解决方案,将智能硬件、智能软件平台、课程体系、师资培训、赛事活动、等级考试、AI实验室项目融为一体。教学对象实现全学段覆盖,教学场景涉及课堂教学、社团活动及实验教学等全方位、多场景,打造定制化人工智能教育全方位解决方案。

